
Pedestrian Detection in Night Driving with LV Technology
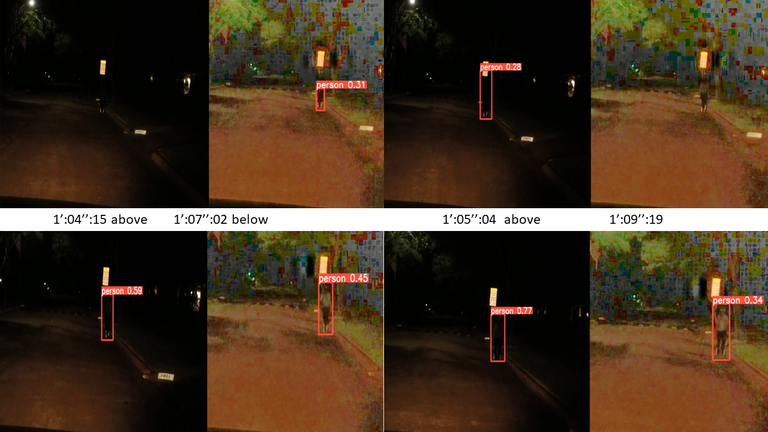
Driving automation requires object detection. Pedestrians, bikers, and all other vehicles close or further away must be detected. Those detections and the tracking of those targets help self-driving systems to make automated driving decisions. About a month ago we started a pilot study at the University of Houston aiming in understanding how Lolaatk Vision’s technology can assist object timely and accurate detection. Below we have four examples from the same video.
The video was processed with LV. The processed frames can be distinguished from the original frames because they are brighter, and contain more detail. Colors appear to be more exaggerated almost surrealistic. Detections are marked by red bounding boxes. With the help of LV, the object detector we use, YOLO 5 detects the pedestrian in the LV processed frame, about 1 sec before the pedestrian is detected in the original video stream.
Examining all four pictures shows that the detection information must be mined from both the LV-processed and the original video streams. One last remark for the AI-aficionados. We used the pre-trained YOLO to perform these detections and we did not apply transfer learning to enhance YOLO’s experience to deal with night videos original and LV-processed. The time succession of the four pictures is top left, then right, bottom left, and finally bottom right. The time stamps are also noted.
{kind=link}